Регулирование подачи центробежных насосов
Определенные аналитически параметры Qa, На, Na и ца при необходимости можно сверить с характеристиками из каталога.




Отрезок соответствует потере напора на трение при подаче Qai. Чтобы уменьшить подачу, предположим, до значения QA2, необходимо частично прикрыть задвижку. Так как сопротивление задвижки входит в общее сопротивление трубопровода, значение последнего с прикрытием задвижки возрастает и характеристика трубопровода пойдет круче (S2)- Напорная характеристика насоса Q—Н будет занимать прежнее положение, так как частота вращения рабочего колеса (п) остается неизменной. Следовательно, при закрытии задвижки режимная точка перемещается по характеристике Q—Н, подача жидкой среды насосом уменьшается и при Qa2 режимная точка займет положение А2. При подаче Qa2Qai скорость потока в трубопроводе уменьшится й потеря напора на трение будет определяться отрезком /гт2, насос же при подаче Qa2 создает напор Н2. Следовательно, отрезок /гзд будет представлять потерю напора в задвижке.
Так как при прикрытии задвижки напор Н2, создаваемый насосом, не полностью используется в сети, а часть его расходуется на преодоление сопротивления задвижки, то КПД насосной установки уменьшается. Мощность, теряемая при дросселировании,


Можно сделать вывод, что метод регулирования подачи с помощью задвижки относительно прост, но неэкономичен, так как часть энергии, потребляемой насосом, гасится в задвижке сразу же на выходе жидкой среды из насоса. Поэтому его рекомендуется использовать для регулирования подачи насосов малой и средней мощности.
Регулировать подачу насоса можно задвижкой, установленной и на его всасывающей стороне. Однако дросселирование потока на всасывании может вызвать чрезмерное понижение его давления, что приведет к возникновению кавитации и срыву работы насоса. Этот метод в практике, как правило, используется редко.
Регулирование подачи изменением частоты вращения рабочего колеса. На рис. 1.28,6 показано положение напорных характеристик (Q—H)i и (Q—Н)2 соответственно при частотах вращения рабочего колеса n2«i- Так как положение запорных органов задвижки остается неизменным, общее сопротивление трубопровода и положение его характеристик не меняются. При уменьшении частоты вращения рабочего колеса режимная точка А будет перемещаться по характеристике S, подача и напор насоса будут уменьшаться.
При частоте вращения рабочего колеса п2 режимная точка займет положение А2, подача и напор насоса соответственно будут иметь значения QA2 и Н2. С уменьшением подачи насоса скорость движения жидкой среды уменьшится и потери напора в трубопроводе снизятся до значения /гт2. Напор, создаваемый насосом при частоте вращения п2, полностью используется в трубопроводе для поднятия жидкой среды на геометрическую высоту Нт и расходуется на потери /гт2 при подаче Qa2. Сравнивая рассматриваемый метод регулирования подачи насоса с методом дросселирования, можно сделать вывод, что регулирование изменением частоты вращения рабочего колеса более экономично. При этом отсутствуют потери на дросселирование потока мощности и экономится электрическая энергия.Однако изменение частоты вращения рабочего колеса насоса связано с определенными техническими трудностями, о чем будет сказано ниже.
Этот метод регулирования используется для насосов большой мощности, когда затраты на устройство той или иной системы изменения частоты вращения меньше затрат на потерю мощности при дросселировании.
Способы изменения частоты вращения рабочего колеса насоса. Частоту вращения вала насоса непосредственно можно изменять при жестком его соединении с валом приводного двигателя. Этот способ может быть использован, если в качестве привода насоса применяются двигатели внутреннего сгорания (ДВС), паровые или газовые турбины, частота вращения вала которых изменяется путем дозирования рабочегоЧела (горючей смеси — ДВС, пара — паровая турбина, продуктов сгорания жидкого топлива — газовая турбина). Однако ДВС и турбины не получили распространения в качестве привода насосов на водопроводных и канализационных насосных станциях. В отдельных случаях на водопроводных станциях небольших населенных пунктов при наличии одного источника электроэнергии устанавливают противопожарные насосы с приводом от ДВС.
Относительно легко можно изменять частоту вращения вала насоса, если приводом его является электродвигатель постоянного тока, частота вращения ротора которого изменяется с помощью реостата, включенного в электрическую цепь ротора. Но электродвигатели постоянного тока в качестве привода насосов целесообразно использовать только в тех условиях, когда имеются относительно мощные электросистемы постоянного тока (промышленные комплексы, заводы и т. д.). Устройство специальной системы для преобразования тока (из переменного в постоянный) с целью питания электродвигателей на водопроводных и канализационных .станциях общего назначения экономически невыгодно.
Наибольшее применение в качестве привода насосов получили .асинхронные электродвигатели переменного тока. Имеется несколько способов регулирования частоты вращения их ротора (переключение числа пар полюсов, изменение активного сопротивления в цепи ротора, изменение частоты питающего тока, устройство коллекторных двигателей). Но использование этих способов сопряжено с техническими трудностями и дополнительными материальными затратами; В отдельных случаях усложняется конструкция электродвигателей, увеличивается их стоимость или ухудшаются механические характеристики. В настоящее время эти способы регулирования частоты вращения асинхронных двигателей переменного тока не нашли еще широкого применения.
Изменение частоты вращения рабочего колеса насоса с помощью промежуточных передач. В этом случае частота вращения двигателя остается неизменной (рис. 1.29). В качестве промежуточной передачи используются гидравлические и электромагнитные муфты.
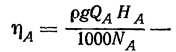
Гидравлическая муфта (рис. 1.30) состоит из двух колес (насосного и турбинного), имеющих форму полутора.

Рабочие полости, разделенные радиальными лопатками, заполняются жидкостью (маслом, водой). Насосное колесо гидромуфты закрепляется на ведущем валу, соединенном с валом приводного двигателя, а турбинное — на ведомом и соединяется с валом насоса. Насосное колесо, вращаясь с частотой п , через лопатки сообщает энергию жидкой среде, которая под действием центробежной силы перемещается к периферии и, поступая на лопатки турбинного колеса, передает полученный запас энергии, заставляя его вращаться с частотой п2 (циркуляция рабочей жидкой среды в полостях гидромуфты показана стрелками). Частота вращения п2 несколько меньше /и в результате относительного проскальзывания колес. Скольжение, а следовательно, и частота вращения ведомого вала зависят .от степени заполнения полостей гидромуфты рабочей жидкой средой. При максимально заполненных полостях и полной нагрузке скольжение составляет около 3%, что соответствует КПД гидромуфты, равному 0,97. При полностью опорожненных полостях скольжение составляет 100%, ведомый вал не вращается.

Внешняя характеристика гидромуфты (рис. 1.31) представляет собой зависимость ее крутящего момента, мощности и КПД от частоты вращения турбинного колеса п2 при постоянной частоте вращения насосного колеса пх. Ее строят по результатам испытаний. При п2, приближающейся к КПД гидромуфты стремится к единице, но так как передаваемая при этом мощность близка к нулю, то даже при очень малых механических потерях КПД не может достигнуть единицы. При п2, близкой к п , КПД гидромуфты составляет 0,96…0,98, а при уменьшении частоты вращения до п2 — (0,75…0,7)rii КПД снижается до 0,75…0,7. Поэтому при использовании гидромуфты в качестве промежуточной передачи для привода насоса необходимо производить технико-экономический расчет с использованием характеристики гидромуфты и определять Цн.уст (КПД установки) при различных условиях работы и способах привода насосных агрегатов.
Применение гидромуфт позволяет плавно регулировать частоту вращения рабочего колеса насоса в широком диапазоне, дает возможность запускать и останавливать центробежный насос с открытой задвижкой, позволяет относительно просто автоматизировать управление всеми насосами станции с одного пульта.
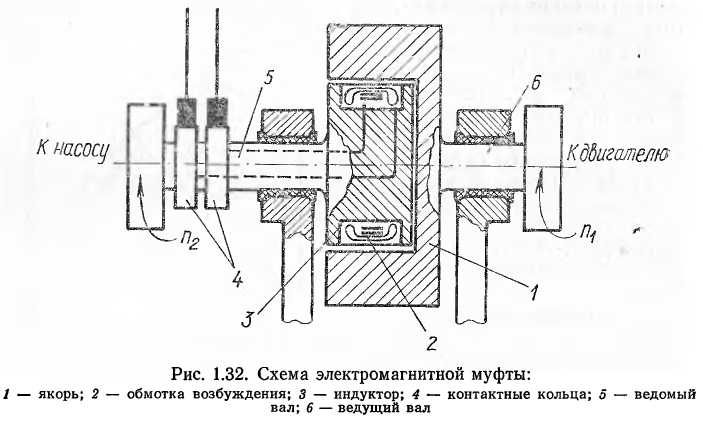
Промежуточной передачей может служить электромагнитная муфта (рис. 1.32), состоящая из двух дисков (якоря, индуктора), механически не связанных между собой. Якорь соединен с ведущим валом привода, а индуктор — с ведомым валом насоса, на котором имеются контактные кольца. Через обмотку возбуждения на индукторе пропускается постоянный электрический ток. При вращении якоря с частотой п и пропускании через обмотку тока возбуждения между якорем и индуктором возникает электромагнитная связь, в результате чего (с некоторым скольжением) приводится во вращение индуктор с частотой и2. Скольжение (6— (1—П2М1) зависит от силы тока возбуждения. Таким образом, с изменением силы тока возбуждения от номинального значения до нуля будет меняться скорость вращения ведомого вала от максимального значения до полной его остановки. Использование электромагнитных муфт позволяет плавно изменять частоту вращения вала насоса, легко разъединять валы насоса и приводного двигателя, применять дистанционное управление и автоматизацию: