Телемеханическое управление насосными и воздуходувными станциями
Системы телемеханики отличаются от системы местной автоматики использованием способов и устройств, позволяющих во много раз уменьшить число проводов по сравнению с количеством команд и извещений. Сокращение электрических цепей достигается тем, что одну и ту же линию уплотняют, т. е. используют для одновременной передачи многих сигналов. Совокупность технических средств, обеспечивающих независимую передачу сообщений, называют каналом связи. Таким образом, одна линия может служить для многих каналов связи. Для каналов связи телемеханики применяют самостоятельные проводные (воздушные и кабельные), а также радиорелейные линии.
Системы телемеханики по функциям можно разделить на системы телеизмерения (ТИ) — для передачи значений измеряемых величин, телесигнализации (ТС) — для передачи сигналов о состоянии контролируемых объектов и телеуправления (ТУ) — для передачи команд управления.
Так как для управления объектами необходимо знать их состояние, функции телеуправления и телеконтроля осуществляютсяобщими телемеханическими системами ТУ—ТС.
Применяются также комплексные системы телемеханики, все необходимые функции которых (ТИ, ТС, ТУ), а часто и телефонная связь выполняются при использовании одной общей линии связи.
В зависимости от количества объектов, сосредоточенный на одном контролируемом пункте, от взаимного расположения контролируемых пунктов (КП) и диспетчерского пункта (ДП) телемеханические системы подразделяются на системы для сосредоточенных и для рассредоточенных объектов.
Рассмотрим структуру построения системы телемеханики ТУ— ТС независимо от типа конкретного устройства и принятой аппаратуры. Все системы ТУ—ТС состоят из функциональных блоков, участвующих в процессе формирования и передачи сигналов, соответствующих командам управления объектами и извещениям об их состоянии.
На обобщенной структурной схеме (рис. 11.6) блок 1 служит для выработки команд управления, посылаемых с ДП на КП. Этот блок содержит индивидуальные командные элементы (ключи управления, контакты различных датчиков, автоматических устройств, замыкающие в соответствующие моменты времени цепь передачи команд). Блок 2 служит для преобразования команд, поступающих из блока 1, в электрические сигналы, удобные для передачи по каналам связи на КП. Блок 3 представляет собой избирательное устройство, расположенное на КП и служащее для расшифровки принятого сигнала и выработки воздействия на соответствующий индивидуальный исполнительный элемент, который воспринимает этот сигнал.
Индивидуальные элементы исполнения команд объединены в блоке 4. Команды, поступающие из этого блока, воздействуют на соответствующий исполнительный орган 5 объекта управления (кдючают его или выключают, изменяют его положение и т. д.).
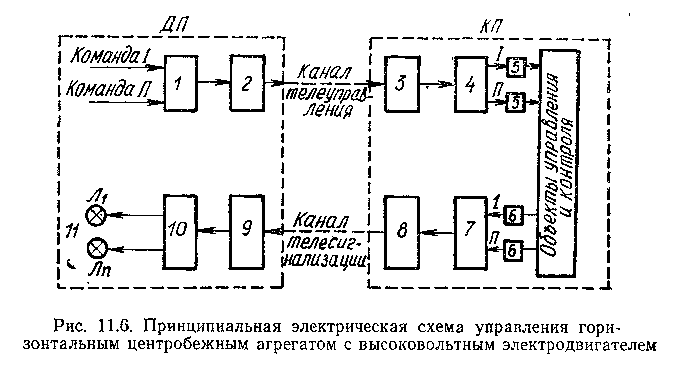
Изменение состояния объекта фиксируется на КП с помощью различных элементов, воздействуя на датчики сигнализации 6, которые включают индивидуальные элементы сигнализации блока 7. Эти элементы воздействуют на блок 8, где формируется извещающий электрический сигнал, который и передается с КП на ДП. На ДП он расшифровывается избирательным устройством 9, сигналы которого в свою очередь воздействуют на исполнительный элемент 10, включающий соответствующие сигнальные элементы И, телемеханизации систем водоснабжения и водоотведения приборостроительной промышленностью производятся телемеханические системы на унифицированных логических элементах «Спектр». На базе этих элементов выпускается общепромышленная серия устройств «Нарт-67». Для управления водохозяйственными объектами используются системы ТМ-100, ТМ.-200 и т. д.
В последнее время начат выпуск комплектных средств телемеханики на базе микропроцессоров. К ним можно отнести комплекс средств телемеханики типа КЭТ-51.01, телемеханические комплексы ТК-301, ТМ-310, ТМ-320, а также локальный управляющий вычислительный комплекс ЛТК-133.