Схемы автоматизации управления насосными агрегатами
Схема обеспечивает отключение насосного агрегата: а) если насос не развивает нормальную подачу; б) при перегреве подшипников; в) при засорении решетки; г) при аварийном уровне воды в водоприемнике (приемном резервуаре); д) при нарушениях нормальных режимов работы электродвигателя.
В этих случаях индивидуальные реле защиты (KV8, КУ 10— KV13) воздействуют на остановку насосного агрегата через аварийное реле защиты KV9. При этом срабатывают реле KV6, KV4, обесточиваются реле KV1 и контактор КМ1. Реле KV9 устанавливается на самоблокировку, исключая повторный пуск до устранения причин аварийной остановки.
В схеме предусмотрена световая сигнализация о положении контактора (лампы HL1, HL2), а также о возможных неполадках в действии электрических и гидромеханических защит.
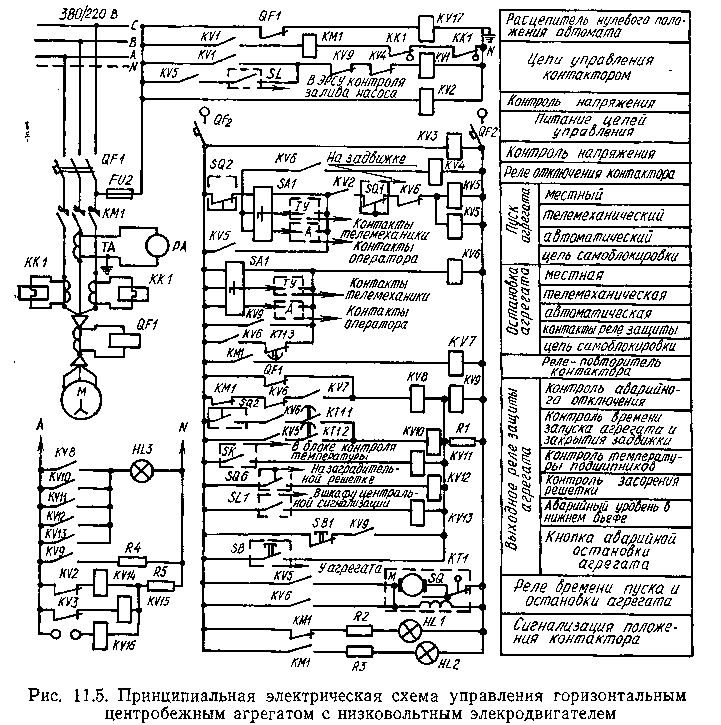
Замыкаются контакты индивидуальных реле защиты и включается лампа HL3 на панели управления. Расшифровка причины неисправности производится по флажкам сигнальных реле. Реле аварийной защиты JKV9 имеет выход в цепи общестанционной сигнализации.
В настоящее время отечественной промышленностью выпускается комплекс устройств, позволяющих набирать щитовое электрооборудование для насосных станций любого назначения полностью из типовых элементов. Комплектными устройствами предусматривается автоматизация процессов пуска и остановки насосных агрегатов разных типов, работающих по различным технологическим схемам; автоматическая защита агрегатов от нарушения режимов работы; автоматическое изменение подачи насосных станций.
Для схем местной автоматики с дистанционным управлением характерно то, что пункт управления и объекты управления расположены недалеко друг от друга (порядка десятков, реже сотен метров). В этом случае каждая посылка приказа управления или передача извещения о состоянии управляемого объекта осуществляется по самостоятельному проводу. Общее число проводов для передачи всего объема информации N=-m + m, где т — количество команд и извещений; т—число обратных проводов: как правило, mf = 1.
Однако в некоторых системах объекты управления удалены друг от друга на расстояние десятков, а иногда и сотен километров. Поэтому для управления такими объектами и контроля за их работой с одного пункта управления применяются специальные устройства, которые получили название систем телемеханики. , ;